Origami-Inspired Robots Spring to Life
Inspired by the traditional Japanese art form of origami, researchers from Harvard University and Massachusetts Institute of Technology (MIT) have figured out how to take flat sheets of specialized paper and plastic and make it self-fold into a complex machine that can “get-up and go”.
 The robot starts as a flat sheet with embedded electronics, which can then transform autonomously into a functional machine. This is done using shape-memory composites that fold themselves along embedded hinges to recreate fundamental folded patterns. The origami-inspired robot can fold itself in 4 minutes and walk away without human intervention. This demonstrates the potential for both complex self-folding machines and autonomous, self-controlled assembly.
The robot starts as a flat sheet with embedded electronics, which can then transform autonomously into a functional machine. This is done using shape-memory composites that fold themselves along embedded hinges to recreate fundamental folded patterns. The origami-inspired robot can fold itself in 4 minutes and walk away without human intervention. This demonstrates the potential for both complex self-folding machines and autonomous, self-controlled assembly.
“This is a new approach of making self-folded machines that have computational and controllable function upon completion of the self-folding process,” said Daniela Rus, Director of the Computer Science and Artificial Intelligence Laboratory (CSAIL) at MIT and one of the authors on the Science report titled “A method for building self-folding machines”. Rus is also a member of the Computing Community Consortium (CCC).
In previous work done by Rus and her colleagues, the self assembly was a single step process and all the joints folded simultaneously under a uniform form. That proved to have some limitations, compared to their new multiple-step design.
“The process produces complex shapes that have the ability to self-assemble using multiple steps. The self-assembling process is partially encoded as computation and partially encoded in the mechanical structure. The resulting mechanisms are dynamic and have function–they can move in controlled ways,” said Rus.
There are many potential uses for these self-folding machines, including search-and-rescue scenarios where they could navigate small tunnels, deploy into space for various forms of exploration, or for self-folding shelters that rapidly assemble in disaster zones. The additional benefit is that these robots can be shipped flat in large quantities and then assembled on-site, making them potentially extremely valuable for our future.
The work was funded by an NSF Expeditions in Computing grant as well as an NSF Emerging Frontiers in Research and Innovation (EFRI) Origami Design for Integration of Self-assembling Systems for Engineering Innovation (ODISSEI) grant. See the Science article for more information.
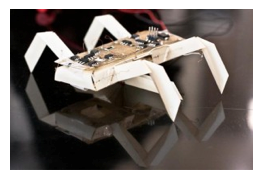
Photo: Jason Dorfman, CSAIL photographer. An insect-like robot printed and designed using the new process being developed to revolutionize the way robots are developed.